Comparative Angle Measurement Equipment calibrates angle position error of two rotary encoders mutually whose graduation position deviation are unknown by applying The Equal Division Averaged (EDA) Method.
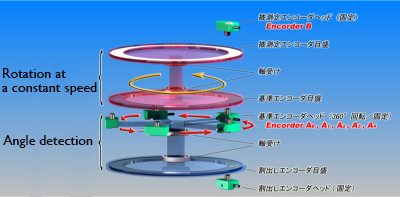
Figure 1 shows the conceptual model of Comparative Angle Measurement Equipment. Reference rotary encoder A and rotary encoder B (to be measured) is connected with the same shaft, and rotate at constant speed. Detection encoder is used for positioning of heads of reference rotary encoder A.
Figure 1
Configuration model of Comparative Angle Measurement Equipment
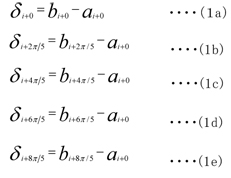
When we measureδi+2πj/5 which represents relative graduation position deviation of encoder A (referenced) and B at the positions A0=0, A1=2π/5, A2=4π/5, A3=6π/5 and A4=8π/5 where angle intervals around a scale disk of encoder A (referenced) are arranged equally into five, for example.(i represents a graduation line number of a encoder, j=0,1,2,3,4)
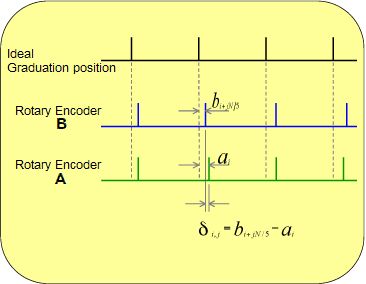
Figure 2 shows the relation between encoder A and B, and ideal graduation.
δi+2πj/5 which represents relative position deviation of A and B can be expressed as equation (1) as shown figure 2.
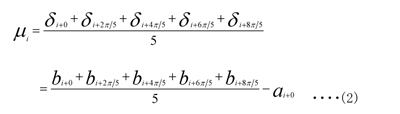
The average value μi of five relative position deviation where positions of reading heads are offset by 2πj/5 can be obtained by equation (2)
Fomula(3) can be obtained by subtracting fomula (2) from formula (1a)

Here, left side of the equation shows the value obtained from measurement value, from which sum of Fourier components can be obtained except the degree of the multiple of 5th-order of position deviation from ideal line position of rotary encoder B bi+0.
Thus the multiple of 5th-order component in the second term on right side is small enough, calibrated value of rotary encoder B can be obtained.
|




